 ESP2866系 NodeMCU(ESP-12F搭載)
ESP2866系 NodeMCU(ESP-12F搭載) 【プログラム】NodeMCU2台で直結無線通信(1スイッチ-1LED)
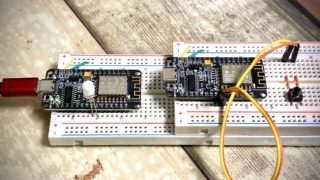
NodeMCU (ESP8266) 2台をESP-NOWで連携させることで、無線環境の無い屋外でもワイヤレス通信で制御が可能となります。今回は、片方のボタンで片方のLEDを制御するプログラムを作成を通し、ESP-NOWの「データ受信時に呼ば...
ESP2866系 NodeMCU(ESP-12F搭載)  ESP2866系 NodeMCU(ESP-12F搭載) ESP2866系 NodeMCU(ESP-12F搭載) ESP2866系 NodeMCU(ESP-12F搭載)
ESP2866系 NodeMCU(ESP-12F搭載) ESP2866系 NodeMCU(ESP-12F搭載) ESP2866系 NodeMCU(ESP-12F搭載)  ESP2866系 NodeMCU(ESP-12F搭載)
ESP2866系 NodeMCU(ESP-12F搭載)  ESP2866系 NodeMCU(ESP-12F搭載)
ESP2866系 NodeMCU(ESP-12F搭載)  ArduinoIDE環境(C言語系)
ArduinoIDE環境(C言語系)  Raspberry pi ESP2866系 NodeMCU(ESP-12F搭載)
Raspberry pi ESP2866系 NodeMCU(ESP-12F搭載)  Arduino
Arduino