 未分類 未分類
未分類 未分類 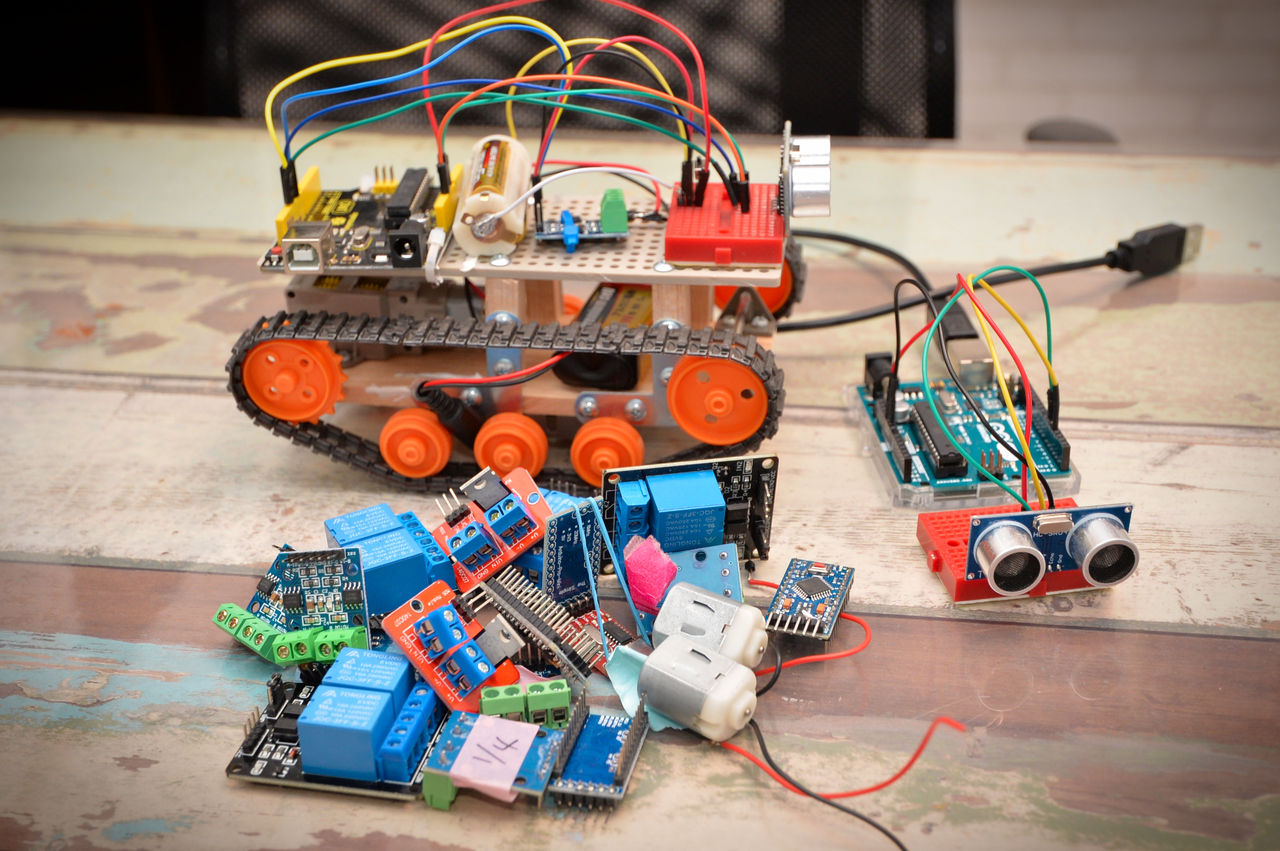 未分類
未分類 リチウムイオン電池自走ロボット前後サーボモーター
include "Servo.h" //サーボモータのヘッダーファイルの読み込み include //PCA9685 pwm = PCA9685(0x40); include include define SERVO_CH 0 //PCA9...
未分類 リチウムイオン電池自走ロボット
include "Servo.h" //サーボモータのヘッダーファイルの読み込み Servo myservo; int VAL=0; void setup(){ Serial.begin(9600); myservo.attach(6,50...
 未分類
未分類 サーボモーター 3個同時制御
/* This is an example for our Adafruit 16-channel PWM & Servo driver Servo test - this will drive 8 servos, one after th...
 未分類
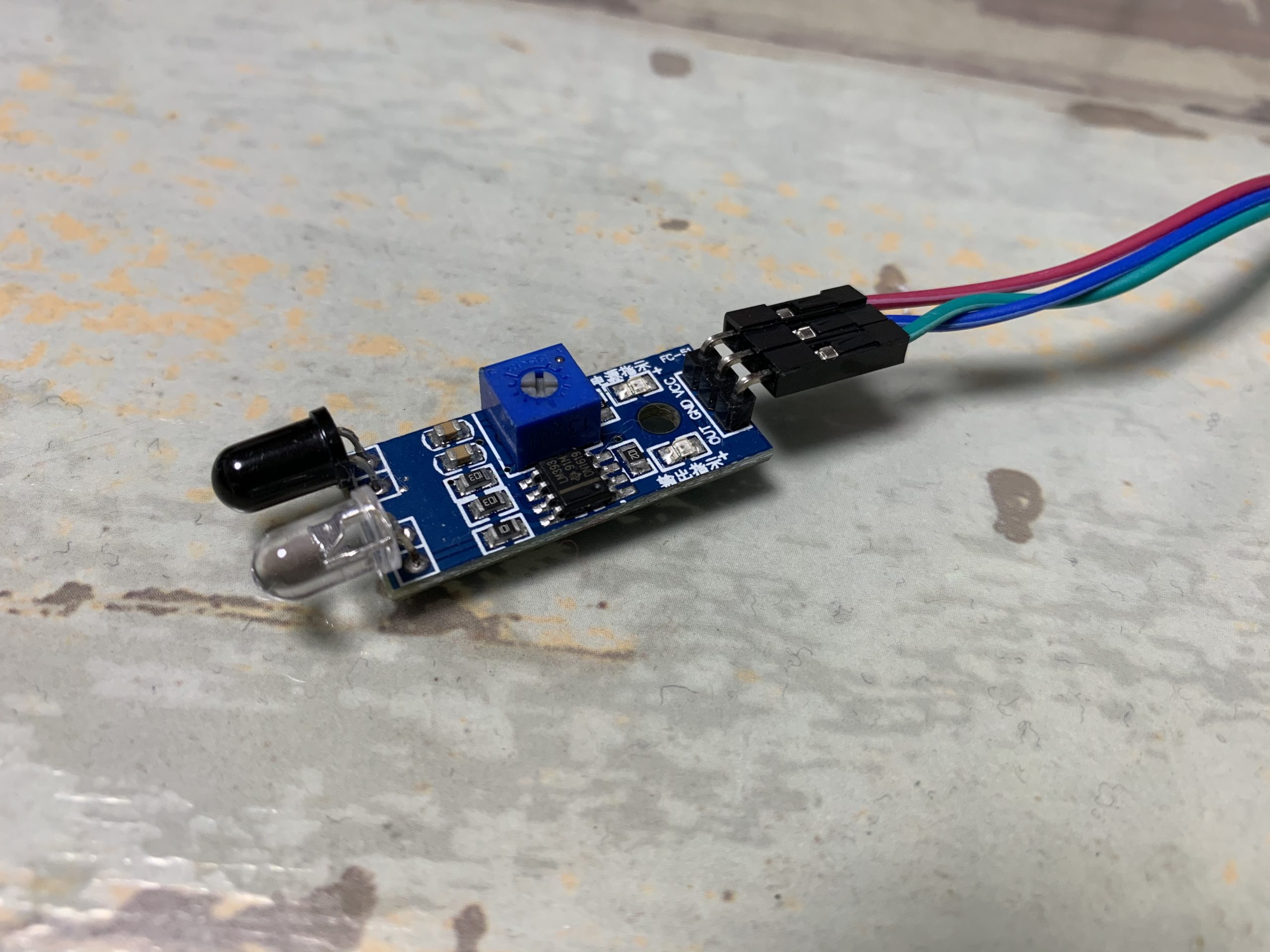
未分類 サーボモーター20Kg赤外線センサー
/*This is an example for our Adafruit 16-channel PWM & Servo driverServo test - this will drive 8 servos, one after the ...
 未分類
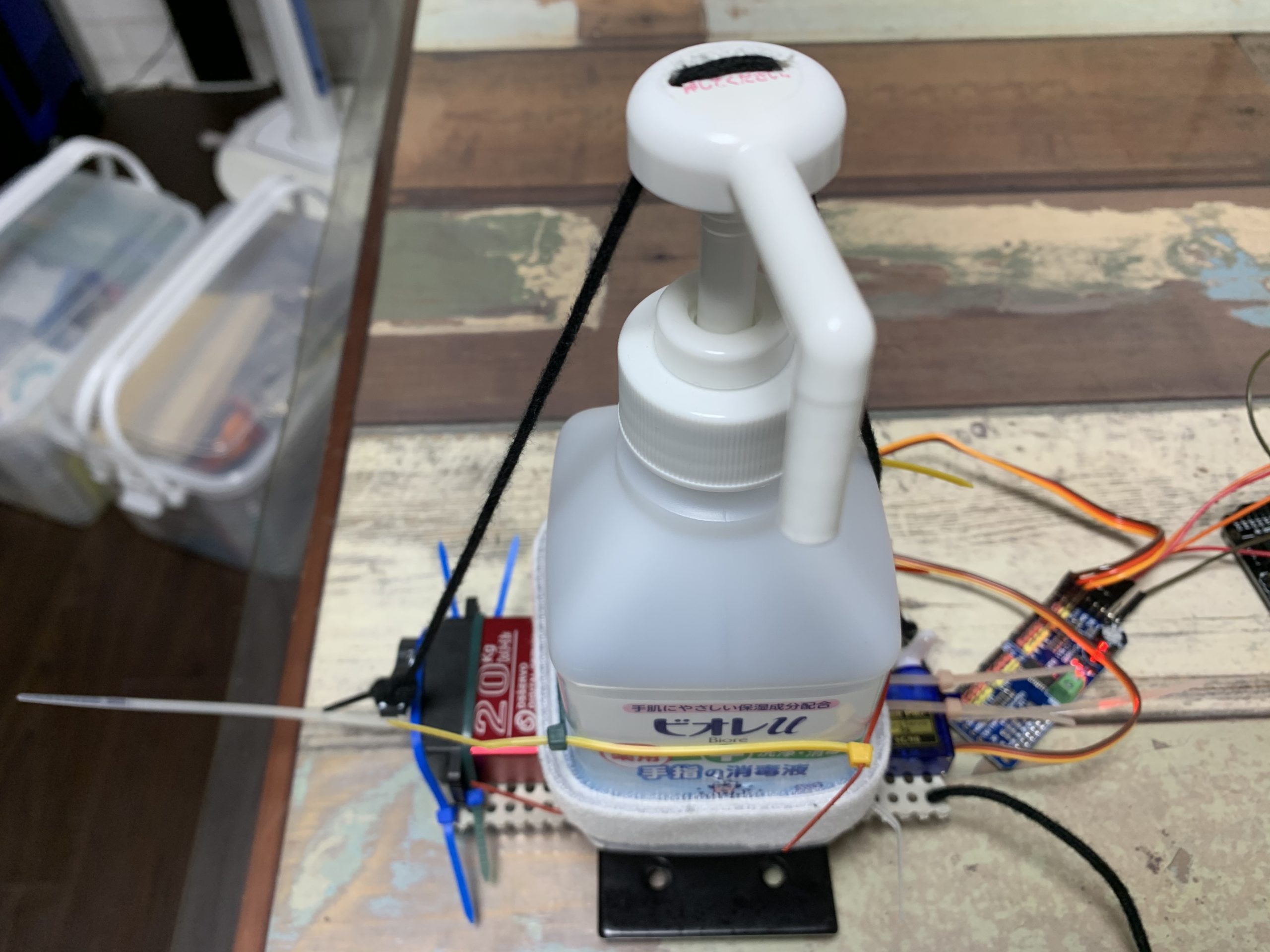
未分類 サーボモーター20kgアルコール消毒
/*This is an example for our Adafruit 16-channel PWM & Servo driverServo test - this will drive 8 servos, one after the ...